 その他の数学 へ戻る
その他の数学 へ戻る
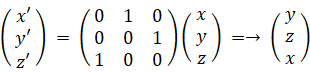
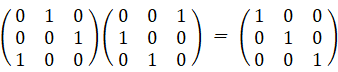
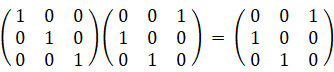
初期状態から、立方体を まず z 軸を中心に90°右ネジ方向に回転させ 引き続き y 軸を中心に90°右ネジ方向に回転させると、 x 方面は y 軸の正の側の軸上になり、 y 方面は z 軸の正の側の軸上になり、 z 方面は x 軸の正の側の軸上になります。
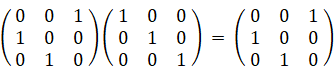
初期状態から、立方体を まず y 軸を中心に90°右ネジ方向に回転させ 引き続き x 軸を中心に90°右ネジ方向に回転させても、 x 方面は y 軸の正の側の軸上になり、 y 方面は z 軸の正の側の軸上になり、 z 方面は x 軸の正の側の軸上になります。
初期状態から、立方体を まず x 軸を中心に90°右ネジ方向に回転させ 引き続き z 軸を中心に90°右ネジ方向に回転させても、 x 方面は y 軸の正の側の軸上になり、 y 方面は z 軸の正の側の軸上になり、 z 方面は x 軸の正の側の軸上になります。
以上の3通りありますが、変換前と変換後がすべて同じなので、これらを等しいものとして、次の式で回転による変換を表すことにします。
( x 軸, y 軸, z 軸 ) = ( x 方面, y 方面, z 方面 )
↓↓
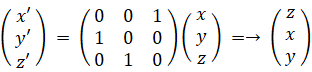
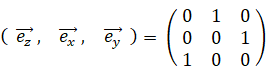
( x 軸, y 軸, z 軸 ) = ( z 方面, x 方面, y 方面 )
この式は、座標基底のベクトリオ( 私によるネーミング )の 1/3巡回転( 私によるネーミング )を表現行列( 私によるネーミング )とする位置ベクトルの写像を担うテンソルを用いて、次のように表すことができます。
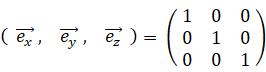
ベクトリオ:
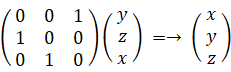
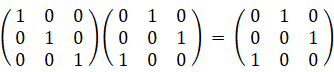
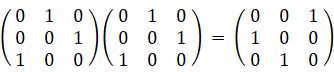
初期状態から、立方体を まず y 軸を中心に90°左ネジ方向に回転させ 引き続き z 軸を中心に90°左ネジ方向に回転させると、 x 方面は z 軸の正の側の軸上になり、 y 方面は x 軸の正の側の軸上になり、 z 方面は y 軸の正の側の軸上になります。
初期状態から、立方体を まず z 軸を中心に90°左ネジ方向に回転させ 引き続き x 軸を中心に90°左ネジ方向に回転させても、 x 方面は z 軸の正の側の軸上になり、 y 方面は x 軸の正の側の軸上になり、 z 方面は y 軸の正の側の軸上になります。
初期状態から、立方体を まず x 軸を中心に90°左ネジ方向に回転させ 引き続き z 軸を中心に90°左ネジ方向に回転させても、 x 方面は z 軸の正の側の軸上になり、 y 方面は x 軸の正の側の軸上になり、 z 方面は y 軸の正の側の軸上になります。
以上の3通りありますが、変換前と変換後がすべて同じなので、これらを等しいものとして、次の式で回転による変換を表すことにします。
( x 軸, y 軸, z 軸 ) = ( x 方面, y 方面, z 方面 )
↓↓
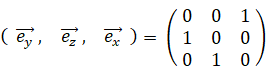
( x 軸, y 軸, z 軸 ) = ( y 方面, z 方面, x 方面 )
この式は、座標基底のベクトリオ( 私によるネーミング )の 2/3巡回転( 私によるネーミング )を表現行列( 私によるネーミング )とする位置ベクトルの写像を担うテンソルを用いて、次のように表すことができます。
さて、次のような式が成り立ちます。
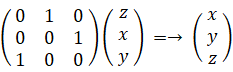
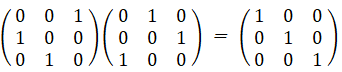
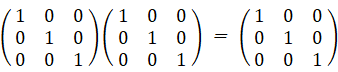
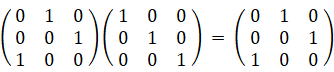
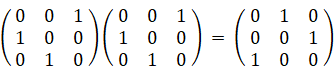
ということは、次の3つのテンソルからなる集合は、テンソルの合成に関して群になっているということです。



群の乗積表 : * 第1行の第2列〜第4列は かけられる行列、 第2行〜第4行の第1列は かける行列
| ◎ |  |
 |
 |
|
|
|
|
|
|
|
|
|
|
|
|