Ⅲ. 「 ベクトルの座標変換 」 と 「 ベクトルの写像 」 との違い
-
これから、「 ベクトルの座標変換 」と「 ベクトルの写像 」との違いについてお話します。 共通点は、 どちらもテンソルによって、 ベクトルとベクトルが1対1対応させられているところです。「 ベクトルの写像 」は、 同一ベクトル空間内での、 あるベクトルから別のベクトルへの対応ですが、「 ベクトルの座標変換 」は、 同一ベクトルの2つのベクトル空間での表示方法の対応です。
本論では、「 ベクトルの座標変換 」での2つのベクトル空間の原点は同一のものであるとします。 すると、 直交座標系の回転によって新たにできた直交座標系への「 ベクトルの座標変換 」は、「 ベクトルの写像 」によりベクトルが座標系と反対方向に回転したことになり、「 ベクトルの座標変換 」と「 ベクトルの写像 」は同等なものになります。 このように、 2つの「 基底の大きさの等しい直交座標系 」の間での「 ベクトルの座標変換 」は、 同一ベクトル空間での「 ベクトルの写像 」に置き換えることができます。 また、 直交座標系の回転に加えて基底の大きさが
 倍になった直交座標系への「 ベクトルの座標変換 」は、 ベクトルを回転して大きさを
倍になった直交座標系への「 ベクトルの座標変換 」は、 ベクトルを回転して大きさを  倍にする「 ベクトルの写像 」と同等なものになります。 このように、 2つの「 基底の大きさの等しい直交座標系 」の間での「 ベクトルの座標変換 」は、 同一ベクトル空間での「 合同変換 」に置き換えることができ、 2つの「 基底の大きさの異なる直交座標系 」の間での「 ベクトルの座標変換 」は、 同一ベクトル空間での「 相似変換 」に置き換えることができます。
倍にする「 ベクトルの写像 」と同等なものになります。 このように、 2つの「 基底の大きさの等しい直交座標系 」の間での「 ベクトルの座標変換 」は、 同一ベクトル空間での「 合同変換 」に置き換えることができ、 2つの「 基底の大きさの異なる直交座標系 」の間での「 ベクトルの座標変換 」は、 同一ベクトル空間での「 相似変換 」に置き換えることができます。しかし、 一般的な、 直交ベクトル空間から斜交ベクトル空間へのベクトルの座標変換や、 斜交ベクトル空間から直交ベクトル空間へのベクトルの座標変換や、 斜交ベクトル空間から斜交ベクトル空間へのベクトルの座標変換の場合は、 そうはなりません。 一般的には、「 ベクトルの座標変換 」では、 たとえ基底の大きさが等しいベクトル空間への座標変換であっても、 同一ベクトルは、 座標変換によってその大きさを変化させます。 なぜならば、 斜交ベクトル空間におけるベクトルの大きさは、 そのベクトルのそれぞれの次元の反変成分と共変成分とを掛け合わせたものの総計から正の平方根をとったもので表されるからです。 例えば、 図-2でいうと、 位置ベクトル
 の大きさは、 次のようになります。
の大きさは、 次のようになります。
図-2
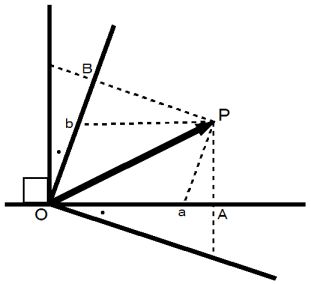
ためしに、 位置ベクトル
はそのままにして、 ∠BOA を変化させてみてください。 の大きさが変化します。ところで、「 ベクトルの写像 」において、 ベクトルの大きさを変えない 「 合同変換 」 になるために、「 演算テンソル 」の表現行列がクリアすべき条件のことを、「 等長条件 」と言います。「 等長条件 」は、「 直交行列、 または、 ユニタリー行列であること。」です。 直交行列とは、 転置行列が逆行列になっている行列のことであり、 ユニタリー行列とは、 直交行列を複素数の世界へと拡張したものです。 等長条件を満たす行列を表現行列とするテンソルを「 等長変換テンソル 」ということにします。「 等長変換テンソル 」は、「 合同変換 」を担う「 演算テンソル 」です。 合同変換とは、 ベクトルの大きさを変えない写像です。 したがって、 合同変換は、 図形の写像においては、図形の形( 鏡面像は除く )や大きさを保ったまま別の場所に移動させる変換になります。 原点の位置を変えない合同変換には、「 回転 」と「 鏡面 ( 反転 )」があります。
 次のページに進む
次のページに進む